Четвертая лекция по дисциплине «Биомеханика мышц» посвящена факторам, определяющим силу и скорость сокращения мышц. Выделены три группы факторов: анатомические (площадь поперечного сечения мышцы, ход мышечных волокон, состав мышц); физиологические (частота импульсации ДЕ, количество рекрутированных ДЕ, синхронизация активности ДЕ); биомеханические (длина мышцы, режим работы мышцы и величина внешнего отягощения).
Лекция 4
Факторы, определяющие силу и скорость сокращения мышц
4.1. Основные понятия
При изучении дисциплин «Физика» и «Биомеханика» вы познакомились с понятием силы как количественной меры взаимодействия тел.
Под силой мышцы (или силой мышечной тяги) будем понимать силу, регистрируемую на ее конце (то есть количественную меру взаимодействия мышцы и регистрирующего прибора).
Условно можно выделить три вида факторов, определяющих силу и скорость сокращения мышц:
анатомические;
физиологические;
биомеханические.
4.2. Анатомические факторы, определяющие силу и скорость сокращения мышц
4.2.1. Сила и скорость сократительного компонента мышцы
К анатомическим факторам, определяющим силу сократительного компонента мышцы и скорость его сокращения, относятся:
- площадь поперечного сечения мышечного волокна (Sмв);
- количество мышечных волокон (nмв)
- ход мышечных волокон (прямой или перистый);
- длина мышечных волокон;
- состав мышц.
Площадь поперечного сечения мышечного волокна (Sмв)
Сила сократительного компонента мышцы во многом зависит от площади его поперечного сечения. Экспериментально установлено, что чем больше площадь поперечного сечения мышечного волокна, (то есть, чем оно толще), тем большую силу оно способно развить. У не занимающихся физической культурой и спортом диаметр мышечных волокон равен 20 – 80 мкм, следовательно, площадь поперечного сечения мышечных волокон варьирует от 300 мкм2 до 5000 мкм2. У бодибилдеров площадь поперечного сечения мышечных волокон значительно больше. Она может достигать 20000 мкм2. На площадь поперечного сечения мышц влияет ряд факторов, таких как: расположение мышцы (верхние или нижние конечности), пол, возраст, особенности конституции человека, а также его уровень тренированности или степень гиподинамии.
Количество мышечных волокон (nмв)
Количество мышечных волокон – второй анатомический фактор, определяющий силу сократительного компонента мышцы. Чем больше волокон содержит мышца, тем большую силу она способна проявить при прочих равных условиях. Число волокон в мышцах различно (табл. 4.1). Так, прямая мышца бедра содержит несколько десятков тысяч волокон, а икроножная – более миллиона!
Таблица 4.1 Количество волокон в скелетных мышцах человека
Автор, год | Название мышцы | Количество волокон |
МакКомас А. Дж., 2001 | плечелучевая | 129200 |
портняжная | 128150 | |
прямая бедра | 27000 | |
передняя большеберцовая | 271350 | |
икроножная | 1033000 |
Площадь поперечного сечения мышцы (Sм) равна площади поперечного сечения мышечного волокна (Sмв) умноженной на количество волокон (nмв): Sм= Sмв nмв.
В анатомии, физиологии и биомеханике хорошо известен принцип Вебера: «Сила мышц, при прочих равных условиях, пропорциональна ее поперечному сечению» (Ухтомский А.А, 1927.– С. 72). Из мышц, обслуживающих тазобедренный сустав, самый большой физиологический поперечник у односуставных разгибателей бедра (большой ягодичной м.): 30,3±9,4 см2. Из мышц, обслуживающих движения в коленном суставе самый большой физиологический поперечник – у четырехглавой мышцы бедра: 56,0±11,0 см2. Из мышц, обслуживающих голеностопный сустав – у камбаловидной м.: 23,7±10,6 см2. Эти мышцы носят название антигравитационных.
Преобладание физиологических поперечников этих мышц над их антагонистами связано с необходимостью постоянно противодействовать силе тяжести (гравитации). Именно с этим связан тот факт, что площадь поперечного сечения мышц-разгибателей нижних конечностей (антигравитационных мышц) относится к площади поперечного сечения их антагонистов как 2:1, в то время как для мышц верхних конечностей это отношение составляет 1:1.
Следует запомнить, что тренировка на развитие силы мышцы приводит к увеличению площади ее поперечного сечения. Возрастание этого показателя происходит за счет увеличения площади поперечного сечения мышечных волокон (гипертрофии мышечных волокон). Увеличения количества мышечных волокон (гиперплазии) в мышце не наблюдается.
Ход мышечных волокон
Ход мышечных волокон определяет как силу сократительного компонента мышцы, так и скорость его сокращения.
В организме человека, кроме веретенообразных мышц с прямым ходом волокон, имеются перистые мышцы. В перистых мышцах не вся сила, генерируемая мышечным волокном, передается сухожилию. Это связано с тем, что мышечные волокна расположены под углом к длиннику мышцы. Этот угол называется углом перистости. Чем больше угол перистости, тем больше проигрыш в силе, передаваемой мышечным волокном сухожилию. Теоретически, если угол перистости равен 90 град, мышечное волокно не оказывает тянущего усилия на сухожилие. Однако в реальных условиях угол перистости варьирует в пределах от 10 до 30 град. Расчеты показывают, что проигрыш в силе из-за расположения мышечного волокна под углом к сухожилию небольшой. Однако благодаря перистой архитектуре в том же объеме, какой занимает веретенообразная мышца, может быть «упаковано» значительно больше мышечных волокон, поэтому значительно возрастает физиологический поперечник а, следовательно, и сила, развиваемая перистой мышцей. Благодаря перистой архитектуре камбаловидная мышца будет выигрывать в силе у мышцы с параллельным ходом мышечных волокон более чем в 10 раз. Следует отметить, что в гипертрофированных мышцах углы перистости больше.
Именно поэтому большинство антигравитационных мышц имеет перистое строение. К ним относятся: четырехглавая мышца бедра, трехглавая мышца голени. Следует отметить, что, с одной стороны, перистая мышца превышает показатели мышцы с прямым ходом мышечных волокон по силе сокращения, с другой – во столько же раз проигрывает в скорости сокращения.
Длина мышечных волокон
Длина мышечных волокон определяет как силу, так и скорость сокращения мышцы. Стало аксиомой утверждение, что «короткие мышцы сильные, длинные – быстрые». Принцип Бернулли гласит, что степень сокращения мышцы при прочих равных условиях пропорциональна длине ее волокон. Поэтому, чем длиннее мышца, тем в большей степени она способна укоротиться за единицу времени и, следовательно, тем больше ее скорость сокращения.
Состав мышц
От того, из какого типа волокон состоит мышца, зависит как сила сократительного компонента, так и скорость его сокращения.
В первой лекции были подробно описаны типы мышечных волокон:
- медленные неутомляемые (I тип);
- быстрые неутомляемые или промежуточные (IIА тип);
- быстрые утомляемые (IIВ тип).
Мышечным волокнам соответствуют различные двигательные единицы (ДЕ).
Состав мышечных волокон разных мышц сильно отличается и в одной и той же мышце имеет огромные индивидуальные различия, зависящие от врожденных типологических особенностей человека. Более подробная информация приведена в первой главе.
4.3. Физиологические факторы, определяющие силу и скорость сокращения мышц
4.3.1. Физиологические механизмы регуляции силы и скорости сокращения мышцы
К физиологическим механизмам регуляции силы и скорости сокращения мышцы относятся:
- частота (паттерн) разрядов двигательной единицы (ДЕ);
- число активных ДЕ;
- синхронизация работы ДЕ.
Прежде чем перейти к рассмотрению влияния этих механизмов на силу и скорость сокращения мышц, вспомним определение ДЕ.
ДЕ называется система, включающая α-мотонейрон и иннервируемые им мышечные волокна.
Частота разрядов ДЕ
При увеличении частоты разрядов ДЕ, то есть нервных импульсов, поступающих из ЦНС к мышце, происходит переход от слабого одиночного сокращения к сильным тетаническим сокращениям мышечных волокон.
Число активных ДЕ
Число ДЕ, активных в процессе сокращения мышцы, определяется «принципом размера» или правилом Хенеманна. Установлено, что имеется стабильный порядок рекрутирования ДЕ: вначале рекрутируются ДЕ S типа, иннервируемые мотонейронами, имеющими небольшой диаметр аксона. По мере усиления сокращений начинают рекрутироваться ДЕ FR типа, содержащие быстрые неутомляемые волокна, затем – ДЕ FF типа, содержащие быстрые утомляемые волокна, иннервируемые мотонейронами, имеющими самый большой диаметр аксона. С точки зрения механики, этот принцип очень целесообразен, так как создается возможность тонкой градации мышечной силы во всем физиологическом диапазоне.
Принцип размера позволяет объяснить факты, полученные эмпирическим путем. Все спортсмены, применяющие силовые упражнения, хорошо знают, что, используя небольшие отягощения, невозможно эффективно наращивать силу мышц. Для развития силовых способностей необходимо применять отягощения, близкие к максимальным.
Эту закономерность можно объяснить следующим. При развитии силовых способностей, если применяются небольшие отягощения, рекрутируются только мышечные волокна I типа, так как мышце нет необходимости развивать высокий уровень силы. Для преодоления субмаксимальных или максимальных отягощений мышца должна развить максимально возможную силу. Поэтому в сокращение вовлекаются все типы мышечных волокон, особенно IIB типа, дающие в процессе тренировочных воздействий максимальное увеличение поперечного сечения и, как следствие – силы мышц.
Синхронизация работы мышц
Синхронизация работы ДЕ – увеличение силы тяги мышцы за счет одновременной активации большого количества мышечных волокон. Исследованиями установлено, что тренировка силовой направленности повышает степень синхронизации работы ДЕ (А.С. Солодков, Е.С. Сологуб, 2001).
4.4. Биомеханические факторы, определяющие силу и скорость сокращения мышцы
Существует ряд факторов, влияющих на проявление силы и скорости сокращения мышцы в преодолевающем и уступающем режимах сокращения. К этим факторам относятся:
- длина мышцы;
- режим работы мышцы;
- значение внешней силы.
4.4.1. Длина мышцы
Еще в 1895 году М. Бликс показал, что при растягивании активной поперечно-полосатой мышцы под воздействием внешней нагрузки ее сила вначале возрастает, а затем уменьшается. Максимум силы получил название максимума Бликса, а длина, при которой он достигался – длины покоя. Последующие исследования показали, что появление максимума связано с особенностями строения мышцы (наличие мышечных волокон (сократительного компонента) и соединительно-тканных образований (упругого компонента мышцы)). Если мышцу освободить от нагрузки, она укоротится до определенной длины. Такая длина получила название равновесной.
Установлено, что у человека вид зависимости «длина–сила» активных мышц определяется соотношением сократительного и упругого компонентов. У мышц, богатых соединительно-тканными образованиями (например, у мышц нижних конечностей человека), зависимость «длина–сила» является монотонно-возрастающей (рис. 4.1а). Если соединительно-тканных образований мало, то кривая имеет минимум (рис. 4.1б).
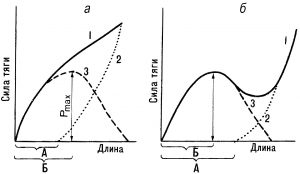
Из этого следует, что при одной и той же длине мышцы нижних конечностей при растягивании способны развить большую силу, чем мышцы верхних конечностей.
4.4.2. Характер работы мышц
Режим сокращения мышцы
Известно, что мышца может работать в нескольких режимах сокращения:
- преодолевающем (концентрическом) – длина мышцы уменьшается;
- уступающем (эксцентрическом) – длина мышцы увеличивается;
- изометрическом – длина мышцы не изменяется.
Установлено, что на силу, развиваемую мышцей, влияет режим сокращения. Если возбужденную мышцу растягивать и регистрировать силу при определенных значениях длины или, наоборот, растянув, дать возможность укорачиваться, то окажется, что при эксцентрическом режиме сокращения (мышца растягивается) при одних и тех же значениях длины мышца развивает большее усилие, по сравнению с концентрическим режимом.
Предшествующий режим сокращения мышцы
Работа мышц при выполнении движений человеком значительно отличается от таковой при имитации ее в лабораторных условиях. Это связано с тем, что обычно в движениях укорочению мышцы предшествует ее растяжение. Еще И.М. Сеченовым (1901) было отмечено, что мышца, сокращаясь в преодолевающем режиме, способна развить большую силу, если этому сокращению предшествовала работа в уступающем режиме (то есть мышца была предварительно растянута). Такой режим работы получил название «баллистический». Последующие исследования подтвердили этот факт. Следует отметить, что техника движений спортсменов учитывает этот фактор повышения силы мышц. Так, например, в метании копья, спортсмен перед выполнением финального усилия находится в позе «натянутого лука», то есть значительно растягивает основные мышцы, чтобы их сокращение в концентрическом режиме было более сильным. Та же закономерность характерна для техники бега и ходьбы, толкания ядра, метания диска, прыжка в высоту, выпрыгивания вверх с места, приседания со штангой.
4.4.3. Значение внешней силы
Преодолевающий режим сокращения мышцы (концентрический режим)
Если мышца сокращается, преодолевая внешнюю силу (например, вес груза), то с увеличением веса груза наблюдаются три закономерности:
- увеличивается время от момента стимуляции мышцы до начала ее укорочения;
- уменьшается высота подъема груза;
- скорость сокращения мышцы снижается.
Первыми зависимость между силой и скоростью (зависимость «сила-скорость») укорочения мышц лягушки получили В. Фенн и Б. Марч. Нобелевский лауреат Арчибальд Хилл (1961) посвятил много времени изучению энергетических процессов, протекающих в мышце. Ему удалось получить соотношение между скоростью сокращения мышцы и силой, которое носит теперь его имя. Оно называется «характеристическое уравнение Хилла».
Vм=b(P0-P)/(P+a)
где: P0 – максимальная масса груза, при которой не происходит укорочения мышцы; P – масса груза; a,b – константы.
Проведенные впоследствии эксперименты на мышцах человека подтвердили данные, полученные А. Хиллом: чем больше внешняя сила, тем ниже скорость сокращения мышцы. Исследования спортивных движений показали, что между дальностью метания и весом ядер наблюдается зависимость, близкая к гиперболической. То есть, чем больше вес снаряда, тем меньше результат.
Эксцентрический режим
Следует отметить, что изучение зависимости «сила-скорость» (концентрический режим) привлекало внимание многих исследователей, в то время как эксцентрический режим оставался менее исследованным. А. Хилл находил, что при эксцентрическом режиме сила мышцы возрастает с увеличением скорости растяжения. П.В. Коми (1973) использовал специальный динамометр для регистрации усилий, развиваемых двуглавой мышцей плеча человека в концентрическом и эксцентрическом режимах сокращения мышцы. Полученные результаты свидетельствуют о том, что при работе двуглавой мышцы плеча в концентрическом режиме зависимость «скорость–сила» может быть описана уравнением гиперболы. При эксцентрическом режиме сокращения увеличение скорости растяжения мышцы приводит к увеличению силы, развиваемой мышцей. Однако последующие исследования, проведенные при исследовании локомоций человека, не подтвердили этого. Дж. Моррисон (J.B. Morrison, 1970) изучал изменение длины, скорости сокращения мышц и силы при различных локомоциях. Он установил, что с ростом скорости растяжения у большинства мышц проявляемая ими сила быстро уменьшается до нуля.
Еще более убедительны исследования, проведенные П.В. Коми (P.V. Komi, 1992). На рис. 4.2 представлено изменение усилий, развиваемых в области ахиллова сухожилия во время фазы опоры бега со скоростью 5,8 м/с.

Отрицательная скорость сокращения мышц соответствует эксцентрическому режиму, положительная – концентрическому. Данные, представленные на графике, свидетельствуют о том, что в фазу растяжения мышцы большие значения усилий, развиваемых мышцей, соответствуют небольшим скоростям растяжения мышцы. В концентрическом режиме большие значения силы также развиваются при небольших значениях скорости.
Таким образом, в настоящее время в мышечной механике достоверно установлена следующая закономерность: с увеличением значений внешней силы скорость сокращения мышц уменьшается. Зависимость нелинейная (гиперболическая).
Рекомендуемая литература
- Зациорский, В.М. Биомеханика двигательного аппарата человека / В.М. Зациорский, А.С. Аруин, В.Н. Селуянов.- М.: Физкультура и спорт, 1981.- 143 с.
- Кичайкина, Н.Б. Биомеханика двигательных действий /Н.Б.Кичайкина, А.В.Самсонова : учебно-методическое пособие /Под ред Н.Б. Кичайкиной.- СПб: НГУ им. П.Ф.Лесгафта, 2014.- 183 с.
- Попов, Г.И. Биомеханика двигательной деятельности: учеб. для студ. учреждений высш. проф. образования /Г.И.Попов, А.В. Самсонова.- М.: Издательский центр «Академия», 2011.- 320 с.
- Самсонова, А.В. Биомеханика мышц: учебно-методическое пособие /А.В.Самсонова, Е.Н. Комиссарова / Под ред А.В.Самсоновой .- СПб., 2008.- 217 с.
- Самсонова, А.В. Некоторые факторы, влияющие на площадь поперечного сечения мышц /А.В. Самсонова //Вестник Петровской академии, Санкт-Петербург, 2010.- 2(16).- С.52-55
- Самсонова А.В. Гипертрофия скелетных мышц человека / А.В. Самсонова.- СПб: Кинетика, 2018.- 159 с. ил.
С уважением, А.В. Самсонова
- Архитектура скелетных мышц
- Рецепторы скелетных мышц и суставов человека
- Биомеханические свойства скелетных мышц человека
- Факторы, определяющие силу и скорость сокращения мышц
- Результирующее действие мышц в организме человека