Координаты тела
Описаны координаты тела, декартова и полярная системы координат. Приведены примеры записи координат тела на плоскости. Дана характеристика использования координат тела при выполнении биомеханического анализа положения тела человека и его движений. Описан метод определения координат тела спортсмена посредством современной системы Qualisys.
Координаты тела человека
Для выполнения биомеханического анализа положения и движений человека необходимо регистрировать координаты определенных точек, например, центров суставов. Это необходимо делать для того, чтобы затем рассчитать перемещение, скорость и ускорение звена, а также изменения межзвенных углов. Координаты тела являются одной из важнейших пространственных характеристик. Давайте познакомимся с этой характеристикой более подробно.
Определение
Координаты тела – это числа, характеризующие положение тела относительно системы отсчета (системы координат).
Существуют различные системы координат. При выполнении биомеханического анализа для описания положения тела в пространстве чаще всего используются декартовы или полярные координаты.
Декартова система координат
В 1637 году французский философ и математик Рене Декарт в своем труде «Рассуждение о методе, чтобы хорошо направлять свой разум и отыскивать истину в науках. Геометрия» для описания положения точки на плоскости ввел прямоугольную систему координат. С тех пор прямоугольная система координат стала широко использоваться в науке и технике и называется также декартовой системой координат.
Прямоугольную систему координат на плоскости образуют две оси – прямые линии, заканчивающиеся стрелками, которые пересекаются друг с другом под прямым углом (рис.1). Поэтому эта система координат названа прямоугольной. Точка пересечения осей называется началом координат и обозначается буквой О.
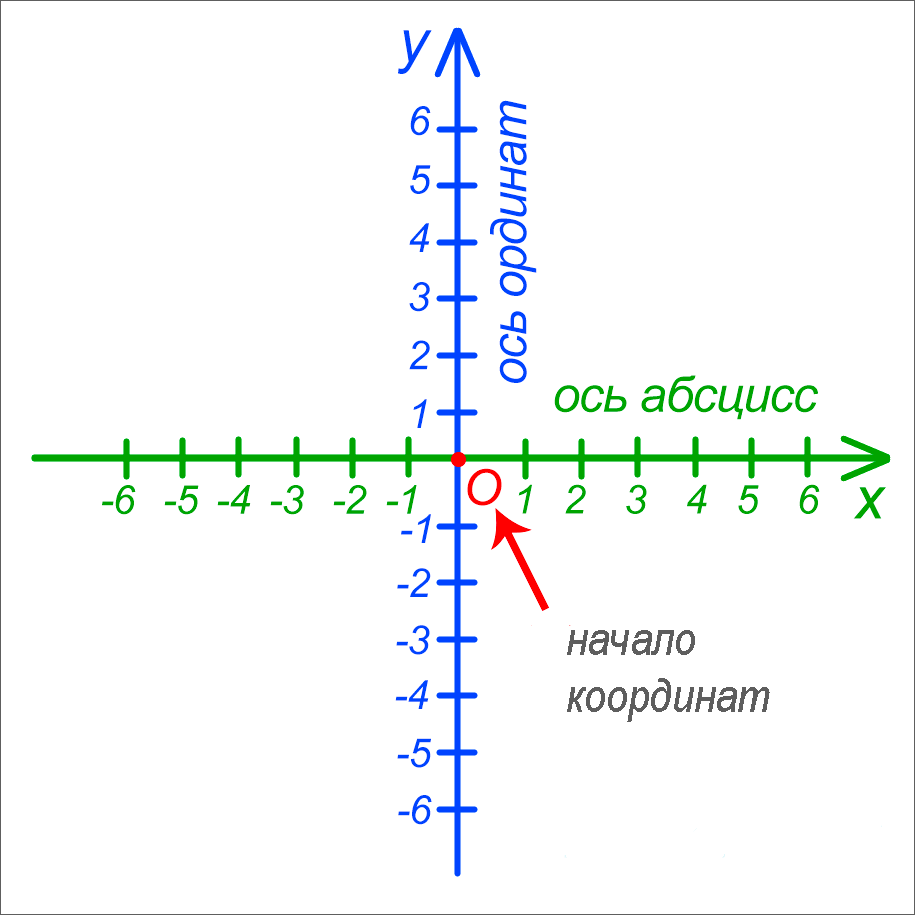
Ось Х называется осью абсцисс. Она расположена горизонтально и направлена слева направо. Ось Y называется осью ординат. Она расположена вертикально и направлена вверх.
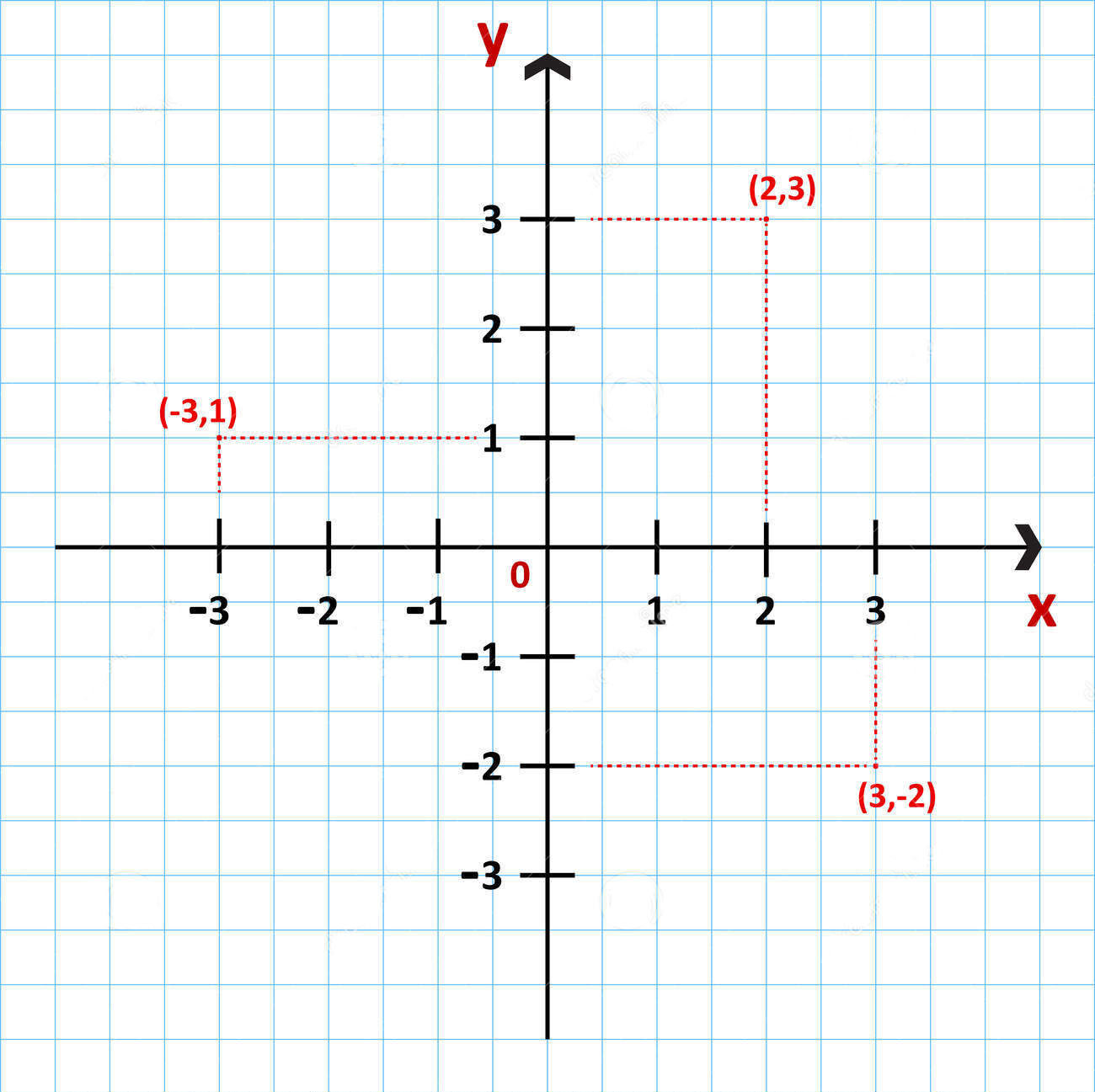
Каждой паре значений х и y, например, х =2; y = 3 на координатной плоскости соответствует одна точка (рис.2). Другой паре значений х и y, например, х = –3; y = 1, соответствует другая точка, Третьей паре значений х и y, например, х =3; y = –2, соответствует третья точка.
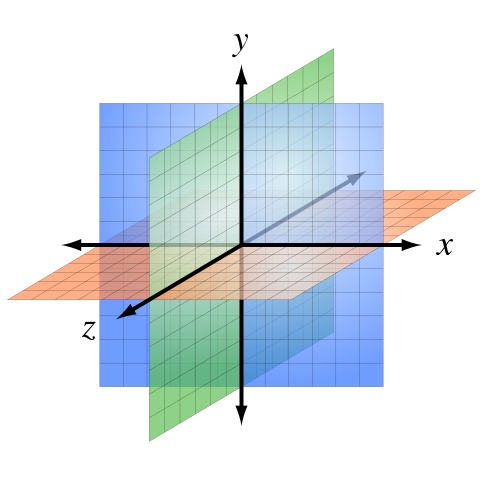
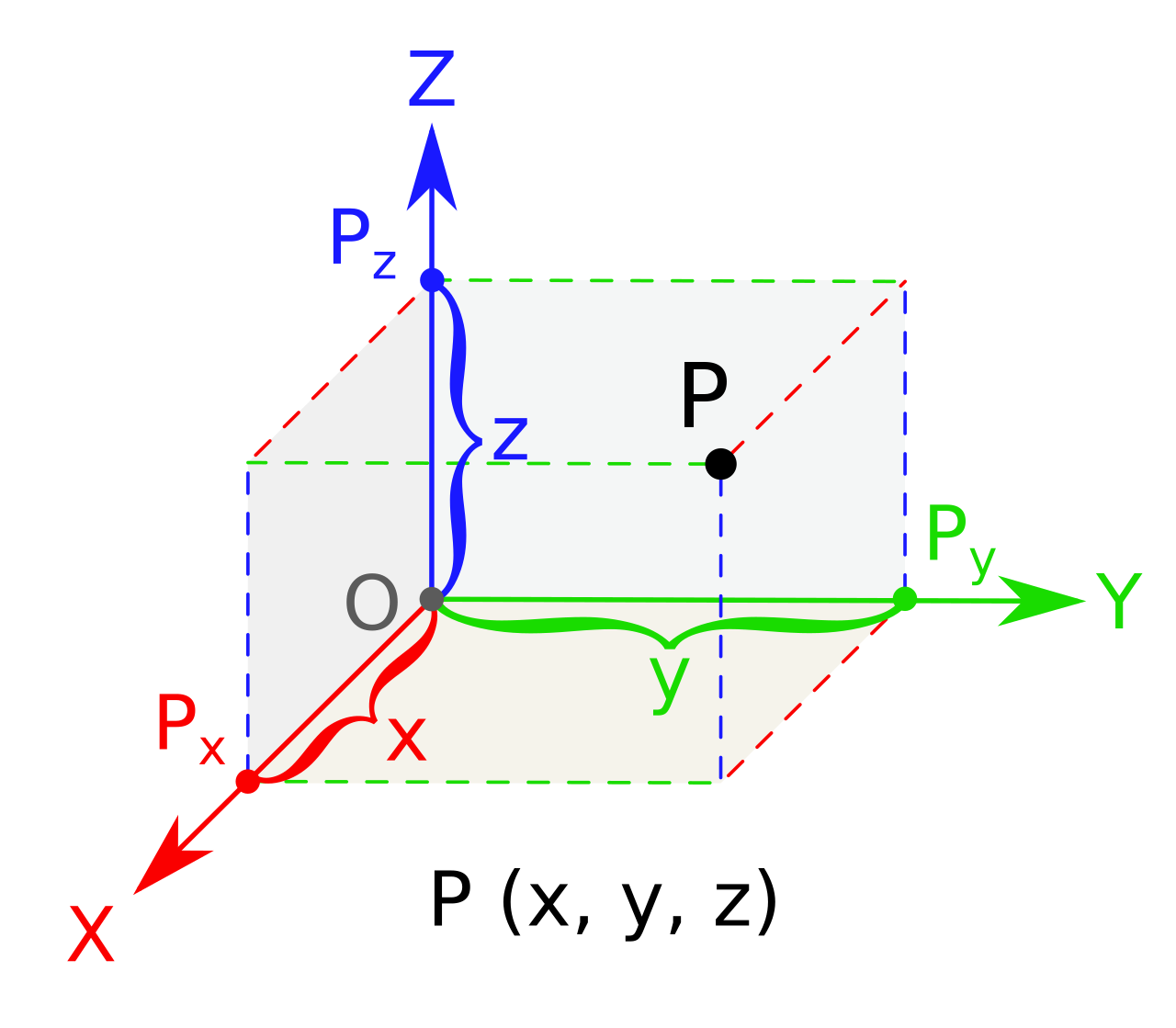
Для определения положения точки Р в пространстве в декартовой системе координат необходимо задания трех координат: x, y, z.
Полярная система координат
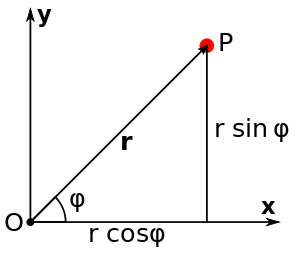
В полярной системе координат на плоскости положение точки Р задается вектором (r), который характеризуется длиной (от точки О до точки Р) и углом фи (рис.4).
Использование координат ОЦМ для биомеханического анализа положений и движений спортсменов
Теперь поговорим о том, для чего нужно знать координаты точки или тела в плоскости или пространстве при выполнении биомеханического анализа движений спортсменов.
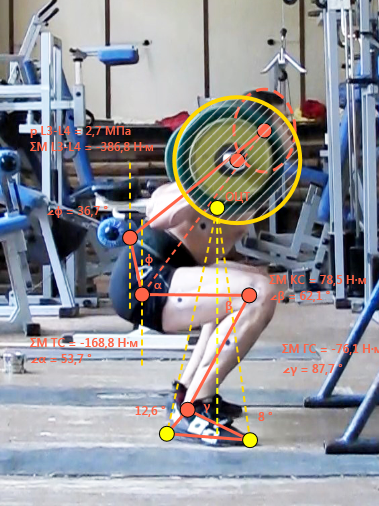
Во-первых, определение координат точки или тела в плоскости и пространстве позволяет решить ряд задач биомеханического анализа статического положения или движения тела. Например, определение координат общего центра тяжести (ОЦТ) системы «спортсмен-штанга» позволяет оценить углы устойчивости при выполнении силовых упражнений (рис.5). Для определения координат общего центра тяжести человека разработаны несложные программы. Одна из таких программ (для Excel) имеется на моем сайте. Для определения координат ОЦТ системы «спортсмен-штанга» при выполнении силовых упражнений со штангой разработана другая программа. Она также размещена на моем сайте.
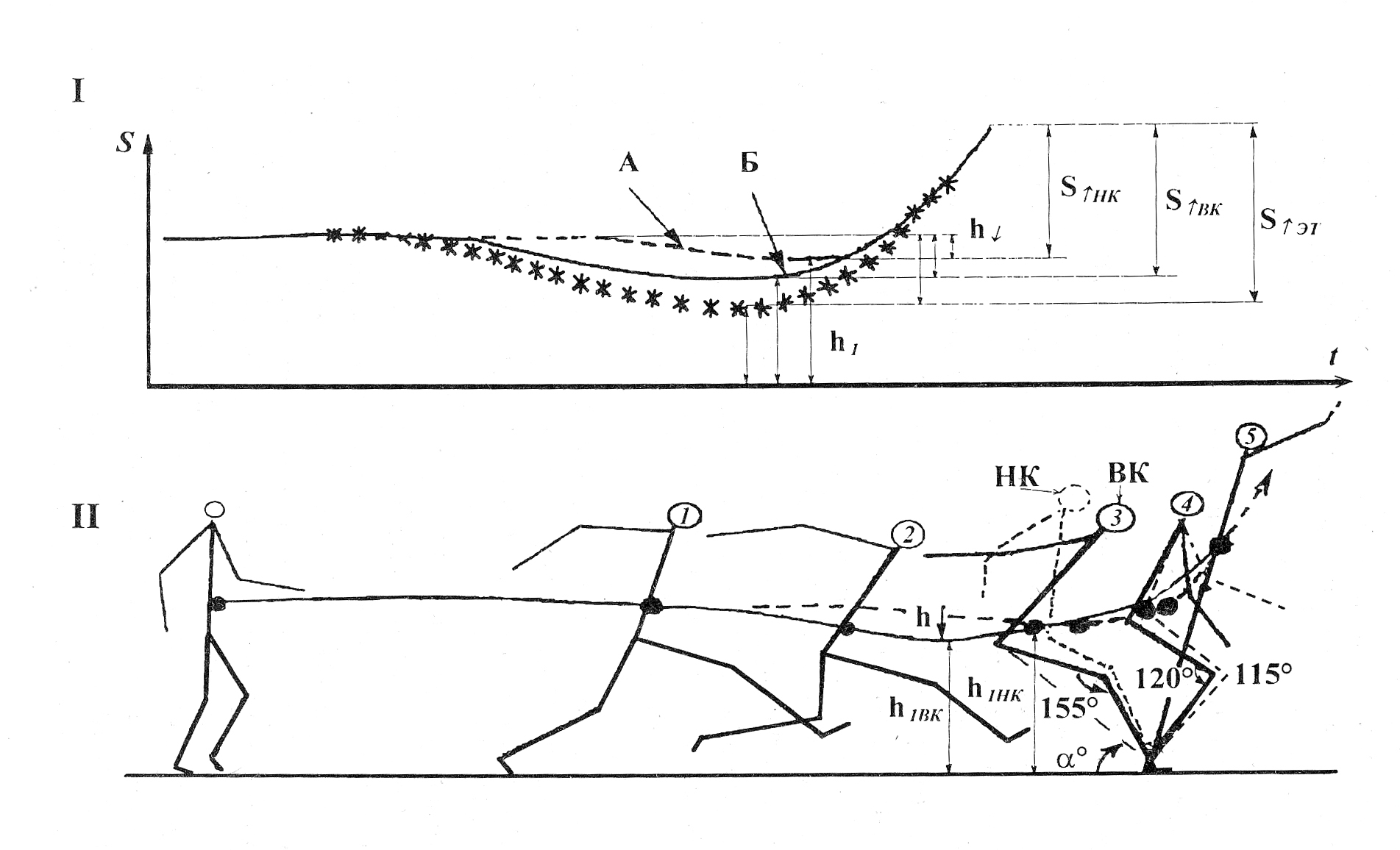
Во-вторых, определение координат ОЦТ тела человека и его траектории при выполнении спортивных движений позволяет разработать критерии технического мастерства спортсмена. На рис. 6 представлена модельная траектория ОЦТ тела (обозначена звездочками), спортсмена выской квалификации (сплошная линия Б) и начинающего спортсмена (штриховая линия А) при выполнении нападающего удара в волейболе.
В-третьих, определение координат тела или других особых точек позволяет рассчитать целый ряд других характеристик: перемещения, скорости или ускорения тела.
Методы определения координат тела человека
До середины ХХ века определение координат точек на теле спортсмена или координат его ОЦТ было очень трудоемким занятием и осуществлялось на основе анализа данных, полученных посредством киносъемки.
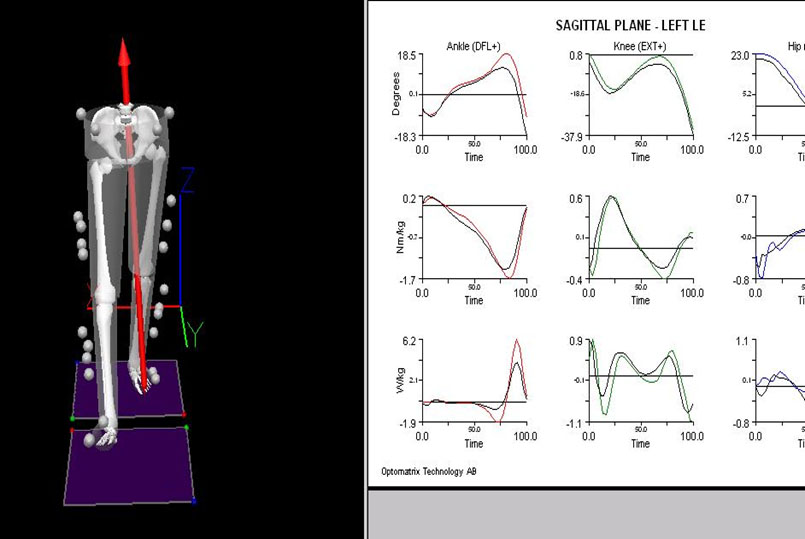
В настоящее время для определения координат точек (маркёров) на теле спортсмена используются специальные системы «захвата движений» (Motion Capture), например, система Qualisys. В этой системе используются камеры ProReflex. Основным отличием камер ProReflex от обычных видеокамер является исходящее от них инфракрасное излучение, направленное на прикреплённые к телу спортсмена маркёры. Его отражение от маркёров в свою очередь регистрируется установленным в камере CCD-датчиком, вычисляющим в режиме реального времени двухмерные координаты центра светоотражающего маркёра. После чего сигнал отправляется в контролирующую систему компьютера (рис.7).

В результате вычислений в режиме реального времени рассчитываются разнообразные механические показатели, характеризующие положение и движение точек в плоскости или пространстве (рис.8).
Литература
- Бегун П.И., Самсонова А.В. Биомеханика опорно-двигательного аппарата человека. – СПб: Кинетика, 2020.- 179 с
- Декарт Рене «Рассуждение о методе, чтобы хорошо направлять свой разум и отыскивать истину в науках. Геометрия, 1637.
- Попов, Г.И. Биомеханика двигательной деятельности: учеб. для студ. учреждений высш. проф. образования /Г.И.Попов, А.В. Самсонова.- М.: Издательский центр «Академия», 2011.- 320 с
С уважением, А.В.Самсонова