В пятой лекции по дисциплине «Биомеханика мышц» анализируется результирующее действие мышц в организме человека. Дается понятие рычага, видов рычагов. Приводятся примеры рычагов различного рода. Формулируется правило рычага.
Лекция 5
Результирующее действие мышц в организме человека
5.1. Понятие рычага
В естественных условиях скелетные мышцы действуют через костные рычаги, а рычаги представляют собой механизмы, известные еще со времен классической древности.
Рычаг – твердое тело, способное вращаться вокруг неподвижной опоры (оси вращения), на которое действуют, по крайней мере, две силы с противоположными моментами вращения.
Одну из них обычно называют движущей (в нашем случае – сила мышц), а другую – силой сопротивления (сила тяжести, вес груза). Использование рычага позволяет получить выигрыш в силе. Для расчета выигрыша в силе существует правило, открытое Архимедом в III веке до н. э. Это правило называется правилом рычага.
Правило рычага
Для того чтобы уравновесить меньшей силой большую силу, необходимо, чтобы ее плечо превышало плечо большей силы. Выигрыш в силе, получаемый с помощью рычага, определяется отношением плеч приложенных сил, рис.5.1.

В 1687 году французский физик П. Вариньон придал этому правилу общий вид, применив понятие момента силы.
Моментом силы называется физическая величина, по модулю равная произведению силы на ее плечо: M=Fh, где: M – модуль момента силы, F– сила, h – плечо силы.
Плечо силы – перпендикуляр, опущенный из центра вращения на линию действия силы.
Правило моментов, сформулированное П. Вариньоном:
Рычаг находится в равновесии, если момент силы, вращающей его по часовой стрелке, равен моменту силы, вращающей его против часовой стрелки.
В механике различают два вида рычагов.
В рычаге первого рода действующие силы расположены по разные стороны от точки опоры. В механике существует закон, открытый в начале новой эры Героном Александрийским. Этот закон называют «золотым правилом» механики.
Выигрывая с помощью механизма в силе, мы во столько же раз проигрываем в пути и наоборот.
Выигрыш в силе означает, что прикладывается меньшая сила. Техническим механизмом, построенным по принципу рычага первого рода, являются ножницы. Ножницы для резки металла имеют длинные рукоятки и короткие лезвия (выигрыш в силе). Ножницы для резки бумаги имеют короткие рукоятки и длинные лезвия (выигрыш в пути). Конструкция весла, используемого в академической гребле, также дает выигрыш в пути (проводка весла) и проигрыш в силе, прикладываемой гребцом к веслу.
В рычаге второго рода действующие силы приложены по одну сторону от точки опоры. Техническим механизмом, реализующим этот рычаг, является тележка с грузом.
5.2. Звенья тела, как рычаги
Костные звенья, соединенные подвижно суставами, с позиции механики, представляют собой рычаги. Сустав при этом является точкой опоры рычага. Примерами рычагов первого рода у человека являются кости нижней конечности и антигравитационные мышцы, противодействующие силе тяжести. Так, сила тяжести Fтяж создает момент силы по одну сторону тазобедренного, коленного и голеностопного суставов, а сила тяги мышц Fм – по другую. Точками опоры рычагов являются тазобедренный, коленный и голеностопный суставы[1]. Человек сможет сохранять неподвижную позу, изображенную на рис 5.2, если момент силы тяжести, создаваемый вышерасположенными звеньями тела Fтяжhтяж будет уравновешен мышечным моментом, Fмhм т.е. будет иметь место равенство: Fтяжhтяж= Fмhм.

Чтобы противодействовать силе тяжести в антигравитационных мышцах человека, в течение длительного времени произошли следующие изменения: увеличился их физиологический поперечник, некоторые из них имеют перистую архитектуру. Кроме того, увеличились плечи силы тяги мышц за счет костных выступов (седалищный бугор и пяточный бугор), а также сесамовидных косточек (надколенник).
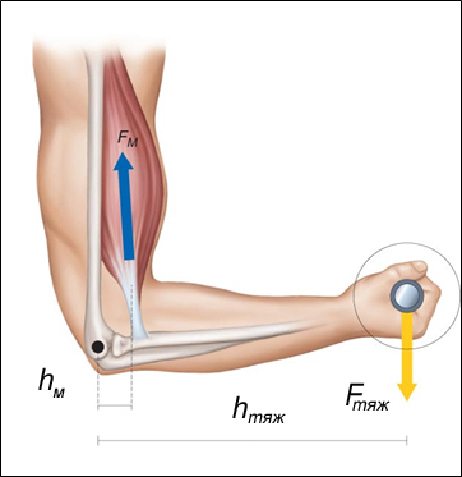
В рычаге второго рода действующие силы приложены по одну сторону от точки опоры. Примером рычага второго рода является предплечье с грузом (рис. 5.3.).
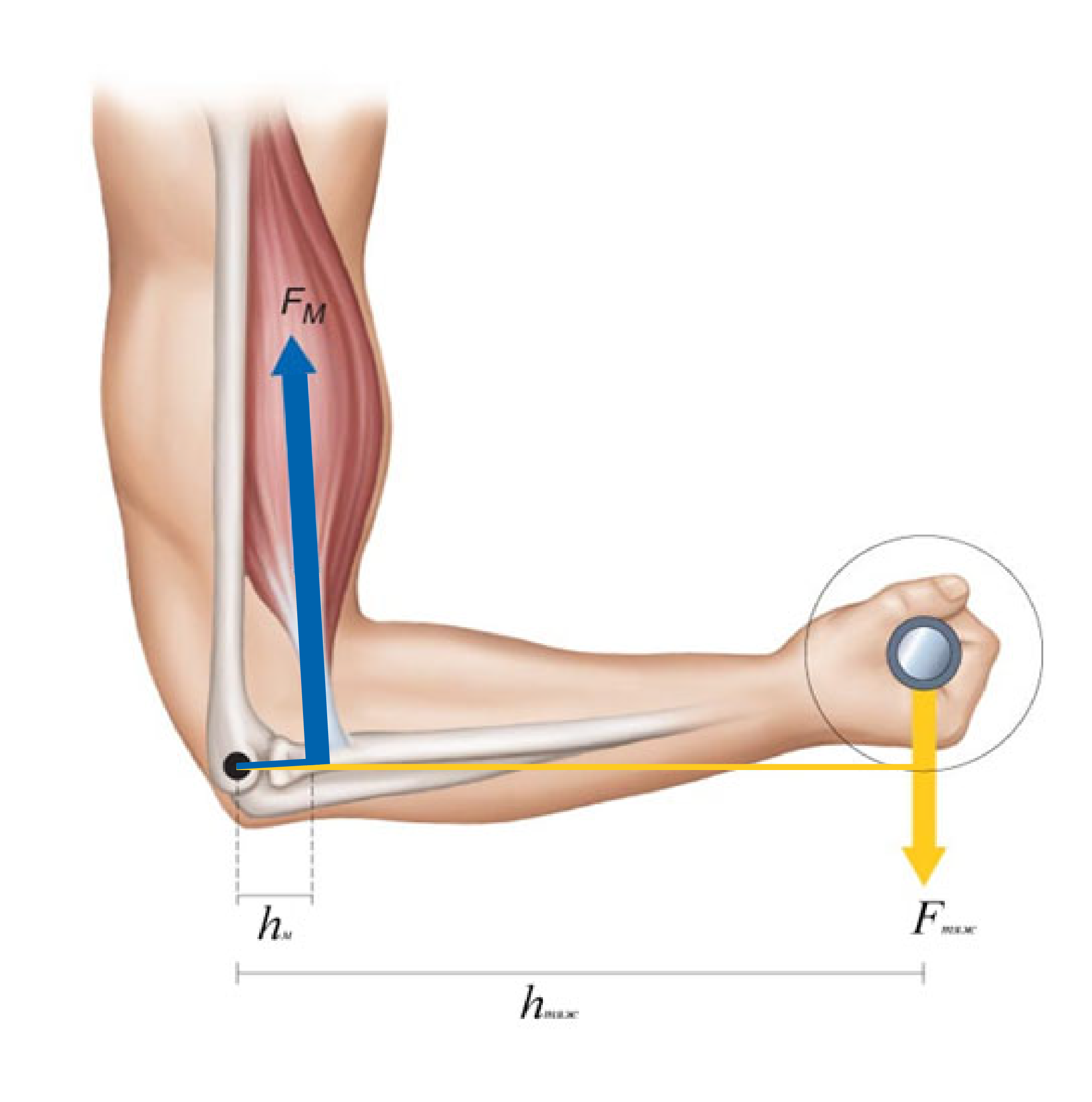
Сила тяжести Fтяж и противодействующая ему сила мышечной тяги Fм приложены по одну сторону от точки опоры (локтевой сустав). Рычаг находится в равновесии, если выполняется то же условие, что и для рычага первого рода:. Fтяжhтяж= Fмhм.
Сила тяги мышцы, как правило, приложена на более коротком плече костного рычага. Поэтому, для уравновешивания рычага сила тяги мышцы должна быть во столько раз больше противодействующей силы, во сколько раз плечо ее силы тяги меньше плеча противодействующей силы. В связи с этим для костных рычагов в организме человека почти всегда имеется проигрыш в силе, но выигрыш в пути и, как следствие – скорости перемещения внешнего груза («золотое правило» механики). Таким образом, биомеханизм характеризуется следующей особенностью: Имеется проигрыш в силе тяги мышц, но выигрыш в пути и в скорости перемещения груза или другого звена.
Рекомендуемая литература
1. Зациорский, В.М. Биомеханика двигательного аппарата человека / В.М. Зациорский, А.С. Аруин, В.Н. Селуянов.- М.: Физкультура и спорт, 1981.- 143 с.
2. Кичайкина, Н.Б. Биомеханика двигательных действий /Н.Б.Кичайкина, А.В.Самсонова : учебно-методическое пособие /Под ред Н.Б.Кичайкиной.- СПб: НГУ им. П.Ф.Лесгафта, 2014.- 183 с.
3. Попов, Г.И. Биомеханика двигательной деятельности: учеб. для студ. учреждений высш. проф. образования /Г.И.Попов, А.В. Самсонова.- М.: Издательский центр «Академия», 2011.- 320 с.
4. Самсонова, А.В. Биомеханика мышц: учебно-методическое пособие /А.В.Самсонова, Е.Н. Комиссарова / Под ред А.В.Самсоновой .- СПб., 2008.- 217 с.
[1] В отличие от технических механизмов, для костных механизмов приходится говорить не о точках опоры, а о «поверхности опоры».
- Архитектура скелетных мышц
- Рецепторы скелетных мышц и суставов человека
- Биомеханические свойства скелетных мышц человека
- Факторы, определяющие силу и скорость сокращения мышц
- Результирующее действие мышц в организме человека