Трехкомпонентная (механическая) модель мышцы
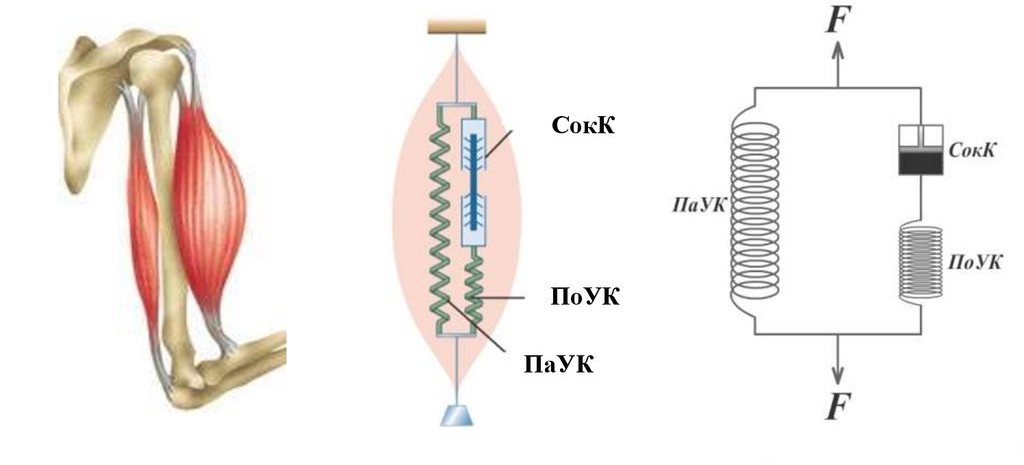
Описана трехкомпонентная (механическая) модель мышцы. В модели имеются три компонента: СокК — сократительный компонент, ПаУК — параллельный упругий компонент, ПоУК — последовательный упругий компонент. Под сократительным компонентом (СокК) подразумеваются мышечные волокна, из которых состоит мышца. Под параллельным упругим компонентом (ПаУК) понимают несколько компонентов мышцы: фасцию, которой окружена мышца и соединительнотканные образования, окружающие мышечные волокна (эндомизий), пучки мышечных волокон (перимизий), а также всю мышцу в целом (эпимизий). Под последовательным упругим компонентом (ПоУК) понимается сухожилие мышцы.
Трехкомпонентная (механическая) модель мышцы человека
Очень часто для того, чтобы понять механизм работы объекта, его заменяют адекватной моделью.
Модель – образ объекта, который содержит его характерные черты.
Для описания процессов, происходящих в мышце при ее сокращении, используются различные модели. Условно их можно разделить на два класса.
К первому классу можно отнести микромодели мышцы, описывающие процесс сокращения на уровне саркомера.
Ко второму классу можно отнести макромодели модели мышцы, не учитывающие особенности молекулярного строения и имеющие своей целью описание мышцы и ее функционирования как целостного образования. Говоря о трехкомпонентной (механической) модели мышцы имеется ввиду описание мышцы и ее функционирования как целостного образования. Уже первые опыты, проведенные в начале ХХ века показали, что биомеханические свойства мышцы очень сложны, поэтому ее нельзя уподоблять пружине с постоянной жесткостью. В связи с этим, было выдвинуто предположение, что мышца может имитироваться системой, состоящей из двух компонентов: активного и пассивного.
Активный (сократительный, контрактильный) компонент моделировался демпфером[1]. Именно в этом компоненте происходит генерация силы тяги мышцы. Пассивный элемент представлялся упругим компонентом.
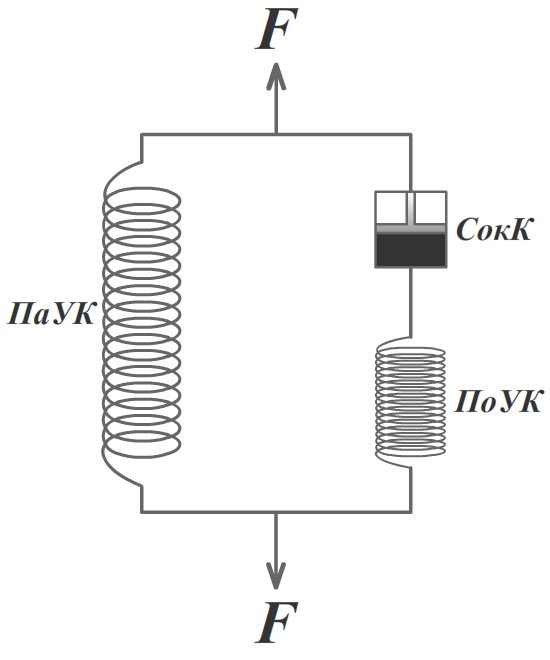
В настоящее время общепринятой является трехкомпонентная (механическая) модель мышцы, содержащая сократительный (СокК), параллельный упругий (ПаУК) и последовательный упругий компоненты (ПоУК), рис.1.
Сократительный компонент (СокК)
Под сократительным компонентом (СокК) подразумеваются мышечные волокна, из которых состоит мышца. При возбуждении мышцы ее волокна генерируют силу. Мышечные волокна характеризуются высокой вязкостью, поэтому в модели их имитируют демпфером.
Параллельный упругий компонент (ПаУК)
Под параллельным упругим компонентом (ПаУК) понимают несколько компонентов мышцы: фасцию, которой окружена мышца и соединительнотканные образования, окружающие мышечные волокна (эндомизий), пучки мышечных волокон (перимизий), а также всю мышцу в целом (эпимизий). Также считается, что к параллельному упругому компоненту можно отнести промежуточные филаменты, имеющиеся внутри мышечного волокна. Эти филаменты ориентированы вдоль мышечного волокна и соединяют соседние Z-диски одной миофибриллы. Они препятствуют растягиванию и разрыву миофибриллы.
В параллельном упругом компоненте наиболее выражены упругие свойства мышц. Так как большинство элементов мышцы, составляющих этот компонент расположены параллельно мышечным волокнам, он получил название параллельный упругий компонент (ПаУК). В трехкомпонентной (механической) модели мышцы этот компонент имитируется пружиной с нелинейной зависимостью между силой и удлинением.
Последовательный упругий компонент (ПоУК)
Под последовательным упругим компонентом (ПоУК) понимается сухожилие мышцы. В этом компоненте также преобладают упругие свойства, однако, жесткость этого компонента больше, чем у параллельного упругого компонента (напоминаем, что жесткость – это коэффициент пропорциональности между силой и удлинением материала). Чем выше жесткость, тем больше сила упругости, возникающая при растяжении (деформации тела). Так как мышечные волокна переходят в сухожилие, то есть сухожилие расположено последовательно относительно сократительного компонента, этот компонент мышцы называется последовательным упругим компонентом (ПоУК). В трехкомпонентной (механической) модели мышцы он также имитируется пружиной с нелинейной зависимостью между силой и удлинением.
Литература
- Зациорский В.М., Аруин А.С., Селуянов В.Н. Биомеханика двигательного аппарата человека. – М: Физкультура и спорт, 1981.- 143 с.
- Бегун П.И., Самсонова А.В. Биомеханика опорно-двигательного аппарата человека. – СПб: Кинетика, 2020.- 179 с.
[1] Демпфер (нем. Dämpfer «глушитель, амортизатор» dämpfen «заглушать») – устройство для гашения (демпфирования) или предотвращения колебаний, возникающих в машинах, приборах, системах или сооружениях при их работе.
С уважением, А.В.Самсонова